
Isaac Sim 一百讲(5):Rigid and Collision
从零开始的 Isaac Sim 之路,第一季开始!
前言#
在此之前,我们已经了解了了解了如何在场景中添加一个物体了,那么在正式认识机器人之前,我们来简单地认识一下 Isaac Sim 中的碰撞。碰撞在内的物理仿真是 Isaac Sim 中一个非常重要的组成部分,甚至说,没有这些物理,Simulator 就无从谈起。毕竟从一开始,仿真关注的就是物理仿真,在此之后才有的图像渲染。
让我们先思考一下一个现实中的物体的物理是如何运作的,一般来说,物体需要遵守牛顿定律,也就是在受到力的情况下会运动,而同时,这个物体还需要可以和其他物体进行碰撞。在这其中,牛顿定律的部分在 Isaac Sim 中被描述为 RigidBodyAPI,通过对物体施加这个 API,物体就可以受到力的作用。而同时,碰撞这一部分则是 collision 处理的范围。
Rigid Prim#
让我们先创建一个初始的程序。
import numpy as np
from isaacsim import SimulationApp
simulation_app = SimulationApp({"headless": False}) # we can also run as headless.
from omni.isaac.core import World
from omni.isaac.core.objects import VisualCuboid
from omni.isaac.core.utils.prims import get_prim_at_path
world = World()
world.scene.add_default_ground_plane()
cube1 = world.scene.add(
VisualCuboid(
prim_path="/World/cube1",
name="cube1",
position=np.array([0, 0, 1.0]),
scale=np.array([0.5015, 0.5015, 0.5015]),
color=np.array([0, 0, 1.0]),
))
cube1_prim = get_prim_at_path("/World/cube1")
for _ in range(10000):
world.step()
simulation_app.close()运行它,你可以看到一个 Cube 出现在了你的 GUI 中,点击左侧栏的播放键,此时就开始运行了。
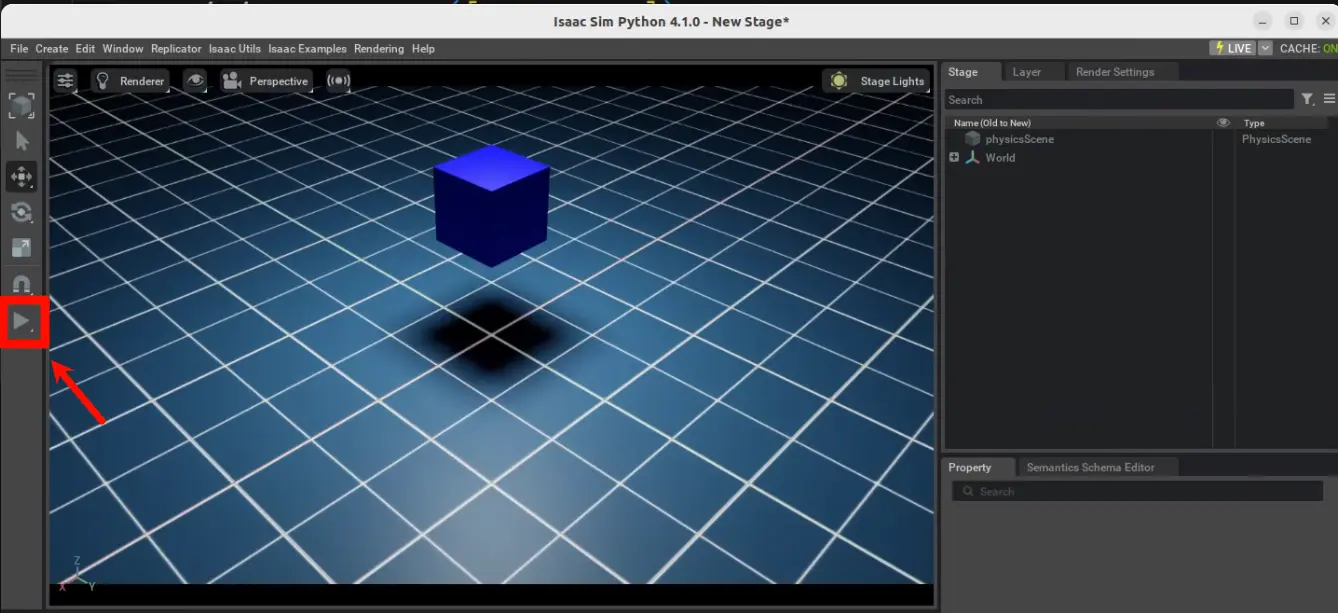
不过读者不难发现,这个 Cube 是悬浮在半空中的,不会受到力的作用,也不会有任何的反馈。在 GUI 中,shift + 左键可以用来在场景里面施加力的,但是你会发现你现在无从操作,等物体被添加了 Rigid 属性之后,你就可以一窥这个操作的效果了。
接下来,让我们来加入一些物理设置。我们可以通过 pxr 来进行一些 USD 的操作。包括之前,读者应该也都不难发现,若干的 USD 相关的操作,都是通过 pxr 调用的。pxr 是 Pixar 出品的 USD C++ API 的 Python 绑定,也就可以用它来调用一些喜闻乐见的函数。
修改代码:
cube1_prim = get_prim_at_path("/World/cube1")
from pxr import UsdPhysics
rigid_body_api = UsdPhysics.RigidBodyAPI.Apply(cube1_prim)
for _ in range(10000):
world.step()再次打开运行程序的时候,并点击播放键的时候,不难看到这样的效果:

可以看到我们的 Prim 已经被添加了 Rigid 属性,并且可以受到力了,只是因为没有碰撞,所以直接穿墙而过。
我们同样可以用 Rigid Body 的 API 来进行一些有趣的操纵,比如说:
from pxr import UsdPhysics
rigid_body_api = UsdPhysics.RigidBodyAPI.Apply(cube1_prim)
from pxr import PhysxSchema
rigid_body_schema = PhysxSchema.PhysxRigidBodyAPI.Apply(cube1_prim)
rigid_body_schema.CreateDisableGravityAttr().Set(True) 运行程序,你会发现这个 Cube 不会受到重力了。但是因为这个物体还没有被施加一个碰撞箱,因此我们不能用 shift + 左键来施加力,后续我们会展示在这个无重力情况下的有趣视觉效果。
在这里我们需要额外注意的是,我们同样是在使用 pxr 来操作这个物体,但是此时我们使用的是 PhysxSchema 而不是 UsdPhysics。简单来理解的话,PhysxSchema 是 Physx 的 C++ API 的 Python 绑定,而 UsdPhysics 是 USD 的 C++ API 的 Python 绑定。在 UsdPhysics 中,本质上是 USD 的协议规定了一系列的物理属性,但是这些物理属性还难以严谨地描述物理仿真,因此我们使用 PhysxSchema 作为一个 「DLC」 来补充物理仿真的各种设置。
关于 PhysxSchema 的更多内容,你可以参考这个网页:
(docs.isaacsim.omniverse.nvidia.com)
具体来说,比如刚才展示的 CreateDisableGravityAttr,你可以依次打开 Classes->Class List->PhysxSchemaPhysxRigidBodyAPI,就可以找到函数 CreateDisableGravityAttr 的说明。
Collision#
既然我们已经获得了一个 Rigid Prim 了,那么接下来,让我们给这个物体添加一些碰撞箱吧。使用以下的代码:
cube1_prim = get_prim_at_path("/World/cube1")
from pxr import UsdPhysics
rigid_body_api = UsdPhysics.RigidBodyAPI.Apply(cube1_prim)
collision_api = UsdPhysics.CollisionAPI.Apply(cube1_prim)
mesh_collision_api = UsdPhysics.MeshCollisionAPI.Apply(cube1_prim)
mesh_collision_api.CreateApproximationAttr().Set("convexDecomposition")
collision_api.GetCollisionEnabledAttr().Set(True)
for _ in range(10000):
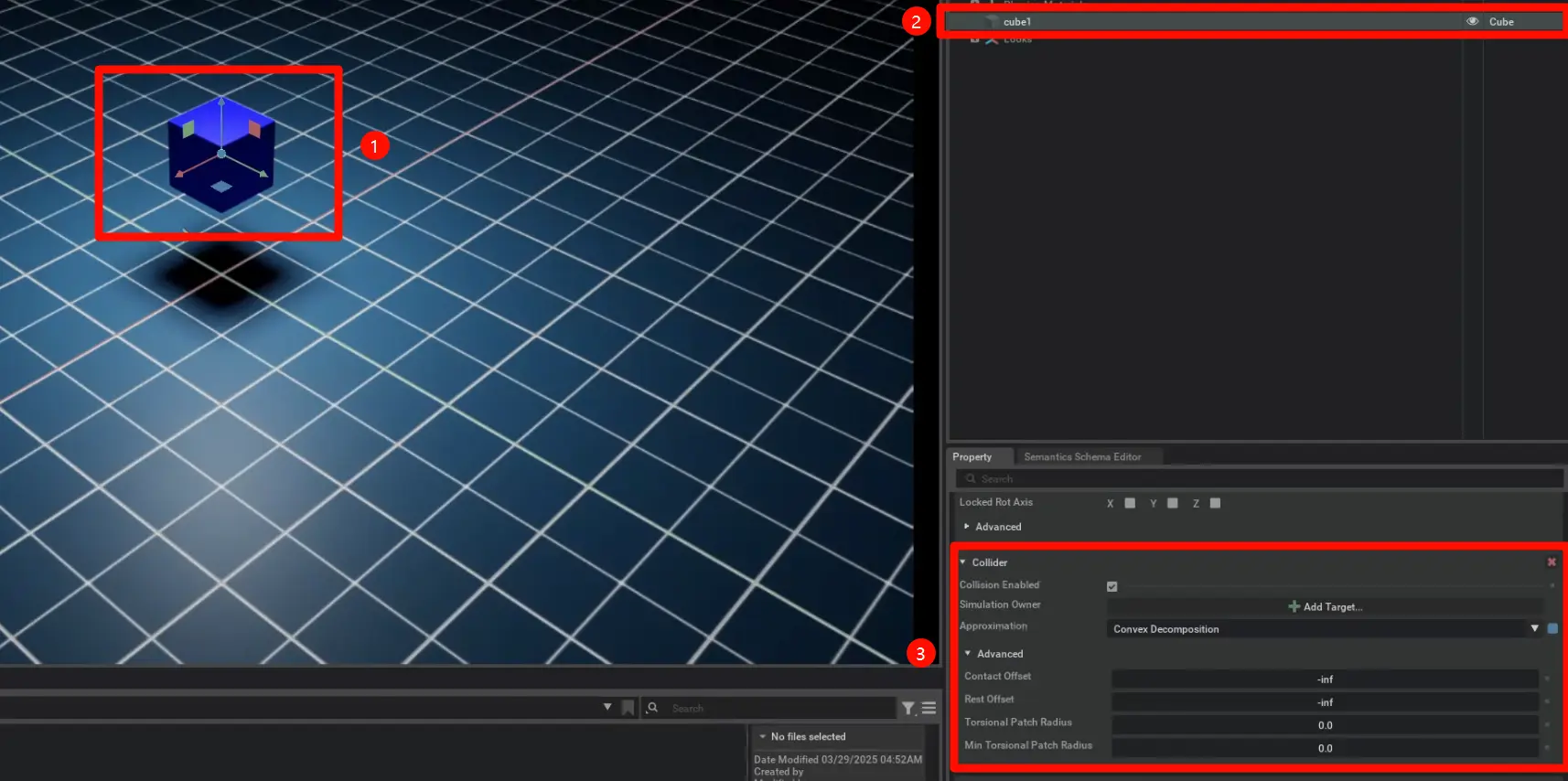
world.step()运行之后不难看到这样的效果,这下不会穿模了。

你可以在 GUI 的右侧看到这样的 Collider 设置:
Collision 进阶#
Cube 太简单了,还记得我们在第三讲管理的资产吗,我们写了一个 add_usd_to_world 函数,我们在这里可以展示另一种将 usd 添加到场景中的方案,当然,它们是等价的。然后我们把上述的内容都重新执行一次。
import numpy as np
from isaacsim import SimulationApp
simulation_app = SimulationApp({"headless": False}) # we can also run as headless.
from omni.isaac.core import World
from omni.isaac.core.objects import VisualCuboid
from omni.isaac.core.utils.prims import get_prim_at_path
from omni.isaac.core.utils.prims import create_prim
world = World()
world.scene.add_default_ground_plane()
cube1 = world.scene.add(
VisualCuboid(
prim_path="/World/cube1",
name="cube1",
position=np.array([0, 0, 1.0]),
scale=np.array([0.5015, 0.5015, 0.5015]),
color=np.array([0, 0, 1.0]),
))
prim = create_prim(
prim_path="/World/banana",
prim_type="Xform",
usd_path="categories/usds/banana/0ac2e7f320d44e84a2647cd81f250107.usd",
translation=np.array([0, 0, 0.3]),
scale=np.array([0.01, 0.01, 0.01]),
)
cube1_prim = get_prim_at_path("/World/cube1")
banana_prim = get_prim_at_path("/World/banana")
from pxr import UsdPhysics
rigid_body_api = UsdPhysics.RigidBodyAPI.Apply(cube1_prim)
rigid_body_api = UsdPhysics.RigidBodyAPI.Apply(banana_prim)
collision_api = UsdPhysics.CollisionAPI.Apply(cube1_prim)
collision_api = UsdPhysics.CollisionAPI.Apply(banana_prim)
mesh_collision_api = UsdPhysics.MeshCollisionAPI.Apply(cube1_prim)
mesh_collision_api = UsdPhysics.MeshCollisionAPI.Apply(banana_prim)
mesh_collision_api.CreateApproximationAttr().Set("convexDecomposition")
collision_api.GetCollisionEnabledAttr().Set(True)
for _ in range(10000):
world.step()
simulation_app.close()需要注意的是,因为加载进来的 USD 并不是具有某个标准尺寸,所以说你可能要调整 scale 以及 translation 的参数,才能让这个 USD 可以用一个正常的尺寸进行展示。在后续的内容中,我们会展示如何来用一个统一的尺度管理这些 USD,但是至于现在嘛,先手动调整一下。
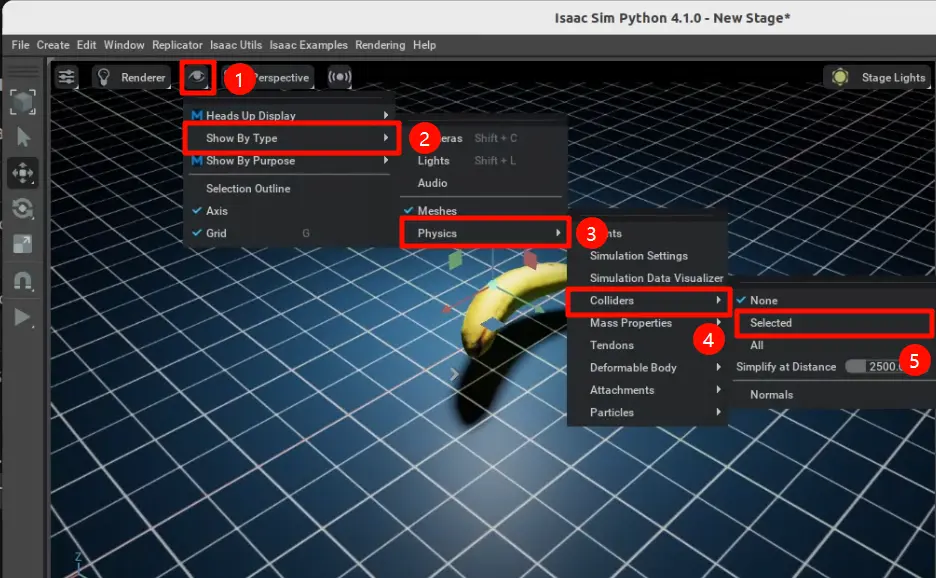
然后,读者可以在 GUI 里面开启 Collider 的可视化。
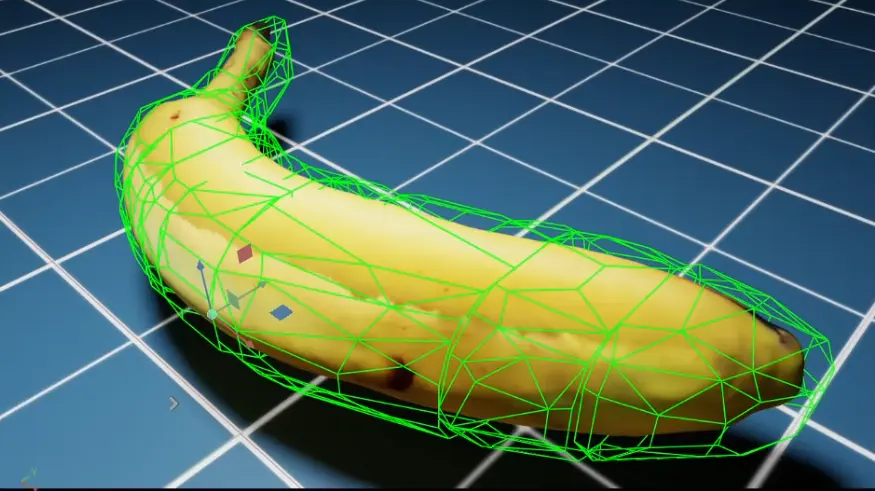
读者可以看到这个 Collider 的贴合效果并不是很好。而一般来说,我们确实会使用 convexDecomposition 来作为这个 Collider 的近似。除此之外,你还可以使用 none 或者 convexHull 或者 sdf。sdf 更加精细,但是需要配置若干 GPU 的内容,我们在将来的间章中再介绍,而另外两个从名字来看就不难发现效果不好。
我们添加一段代码,来用 physx 来设置更加合理的参数:
import numpy as np
from isaacsim import SimulationApp
simulation_app = SimulationApp({"headless": False}) # we can also run as headless.
from omni.isaac.core import World
from omni.isaac.core.objects import VisualCuboid
from omni.isaac.core.utils.prims import get_prim_at_path
from omni.isaac.core.utils.prims import create_prim
world = World()
world.scene.add_default_ground_plane()
prim = create_prim(
prim_path="/World/banana",
prim_type="Xform",
usd_path="/home/gaoning/grasp_vla_assets/categories/usds/banana/0ac2e7f320d44e84a2647cd81f250107.usd",
translation=np.array([0, 0, 0.3]),
scale=np.array([0.01, 0.01, 0.01]),
)
banana_prim = get_prim_at_path("/World/banana")
from pxr import UsdPhysics
rigid_body_api = UsdPhysics.RigidBodyAPI.Apply(banana_prim)
collision_api = UsdPhysics.CollisionAPI.Apply(banana_prim)
mesh_collision_api = UsdPhysics.MeshCollisionAPI.Apply(banana_prim)
mesh_collision_api.CreateApproximationAttr().Set("convexDecomposition")
collision_api.GetCollisionEnabledAttr().Set(True)
from pxr import PhysxSchema
collision_schema = PhysxSchema.PhysxConvexDecompositionCollisionAPI.Apply(banana_prim)
collision_schema.CreateHullVertexLimitAttr().Set(64)
collision_schema.CreateMaxConvexHullsAttr().Set(64)
collision_schema.CreateMinThicknessAttr().Set(0.001)
collision_schema.CreateShrinkWrapAttr().Set(True)
collision_schema.CreateErrorPercentageAttr().Set(0.1)
for _ in range(10000):
world.step()
simulation_app.close()此时再次运行程序,你会发现这个香蕉的碰撞箱更加合理了。
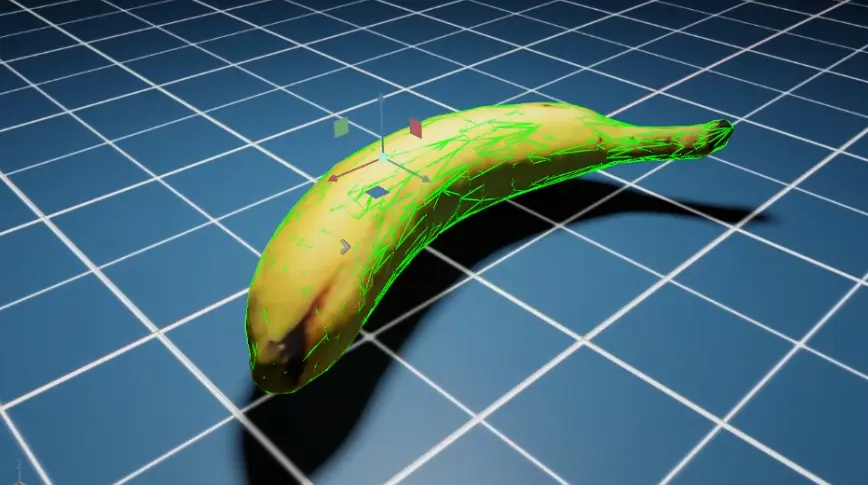
这其中 CreateHullVertexLimitAttr 以及 CreateMaxConvexHullsAttr 都是在设置 Collider 的面数,此处的面数不需要太高。CreateMinThicknessAttr 设置了 Collider 最薄的地方,不然假如说物体本身很细,就可能会穿模。CreateShrinkWrapAttr 和 CreateErrorPercentageAttr 是一切的关键,你可以发现这两个参数使得 Colldier 贴合了,第一个是开启贴合的优化,第二个则是指定错误率的上限。
在这里给出一个更加完整的 Code,包括其他的 Collider 的设置:
def set_colliders(prim_path, collision_approximation="convexDecomposition"):
prim = get_prim_at_path(prim_path)
collider = UsdPhysics.CollisionAPI.Apply(prim)
mesh_collider = UsdPhysics.MeshCollisionAPI.Apply(prim)
mesh_collider.CreateApproximationAttr().Set(collision_approximation)
collider.GetCollisionEnabledAttr().Set(True)
if collision_approximation == "convexDecomposition":
collision_api = PhysxSchema.PhysxConvexDecompositionCollisionAPI.Apply(prim)
collision_api.CreateHullVertexLimitAttr().Set(64)
collision_api.CreateMaxConvexHullsAttr().Set(64)
collision_api.CreateMinThicknessAttr().Set(0.001)
collision_api.CreateShrinkWrapAttr().Set(True)
collision_api.CreateErrorPercentageAttr().Set(0.1)
elif collision_approximation == "convexHull":
collision_api = PhysxSchema.PhysxConvexHullCollisionAPI.Apply(prim)
collision_api.CreateHullVertexLimitAttr().Set(64)
collision_api.CreateMinThicknessAttr().Set(0.00001)
elif collision_approximation == "sdf":
collision_api = PhysxSchema.PhysxSDFMeshCollisionAPI.Apply(prim)
collision_api.CreateSdfResolutionAttr().Set(1024)
return prim在此处不展开介绍。
休息一下#
好了,我们现在已经了解了 Collider 以及 Rigid 如何设置,之后的间章中,我们可能会进一步讨论这些问题,比如说应该如何规避穿模之类的情况。不过,最后,让我们再看一次,太空中飞行的香蕉。

祝你开心~